|
化夢宇留仁が小4の頃、向かいに住んでいた1才年上の「ニシイノヒサヤン」が描いていたのを真似して(笑)、描いていた「ドクロマン」という漫画があった。
その漫画に登場した、記念すべき最初の敵ロボットがこのQ1号である。
最近3DCGの練習をしている化夢宇留仁は、妙な形のロボットがごろごろ出てくるドクロマンのロボットを、練習がてら片っ端から作ってみようと思い立ったわけ。
で、Q1号だが、実は漫画に3コマしか出ていない。

こんな感じで登場し、勇ましく飛んでいったはいいが、次に登場したコマでは

すでに木っ端微塵である(笑)。
まあなにしろ普通の小4よりだいぶ幼稚だったであろう子供が描いたものだから仕方がない(笑)。
しかしかえって情報量が少ないと、適当に誤魔化せるので、練習第1作には丁度良かったかも。

こんな感じに出来上がった。
六角大王スーパー3でモデリングして、それをシェード5に読み込んで表面処理とレンダリングを行った。
六角大王のモデリングにはだいぶ慣れてきたが、それをシェードに取り込むのには苦労した。
なんで六角大王ではあんなに分かりやすいポリゴンの処理が、シェードではちんぷんかんぷんなのか理解に苦しむ。
パーツの整理だけでも苦労させられた。
 またテクスチャの張り付けがよく分からない。 またテクスチャの張り付けがよく分からない。
今回はほとんどのパーツに同じ鉄板を張り合わせたようなテクスチャを使い、色やバンプ(凸 凹)、汚しなんかで変化を付けた。
その鉄板テクスチャも、前にトラベラーのエアラフトをシェード4で作ったときの物の流用。
要するにテクスチャを作るのが面倒だったのである(汗)。
胸の1の数字はブーリアン演算で、1の数字を立体化したものを突きさして、テクスチャだけ反映させている。
これは楽チンでいい感じ♪
気に入っているのが頭部。
いかにもな古くさいSFを感じさせるデザインに、手塚治虫風の目が子供らしくていい感じである(笑)。
内部構造は少し色々付け加えてそれっぽくしてある。
光源の設定も初めていじくったが、目は面光源がいい感じになった。
てっぺんにある謎のドーム(笑)内の光は透明度の高い球と点光源を使っているが、イマイチ思ったようにならなかった。
足の付け根も色々付け加えてみた。

漫画では脚をボディに格納して、ロケット噴射で飛んでいる。
そこでボディ下部と足の裏にロケットノズルを作って、足の付け根は2段階に折れ曲がって、脚が収納位 置に移動するようにした。

う〜〜ん可愛い(笑)。
回転ジョイントを身体の各所に設置して、ある程度ポーズもつけられるようにしている。
ほんとは蛇腹状の脚や腕も動かしたかったあのだが、まだジョイントの繋げ方がよく分からず、今回は断念。
背景はシェードに備わっている機能で表示しているだけで、影をつけるために足下に板を置いたくらい。
ライティングも無限遠光源1このみで、なんの工夫もしていない。
この辺は凝り出すと面白いのだが、面白すぎていつまでたっても終わらないので、今回はそのままにすることにした。
Q2号が出来たらビルを壊しながらのとっくみあいでも作ってみるか(笑)?
・・・とっくみあいの前に、そもそもQ1号の完成度が気になってきた。
六角大王もシェードも触りはじめの作品とは言え、角取りは全然出来てないし、テクスチャもいい加減で、 特に後で作ったモデルと一緒に使おうと思うと結構無理がある。
そこで部分的に修正していくことにした。
修正にはシェード5を使ったのだが、元のデータがポリゴンなだけに、メッシュだらけで把握がしにくい上に、加工が面倒くさい。
仕方ないので気になるパーツ毎にシェードの自由曲面で作り直していった。
そしてふと気がつくと、全体の99%をまったく新しく作り直していたのだった・・・(汗)。
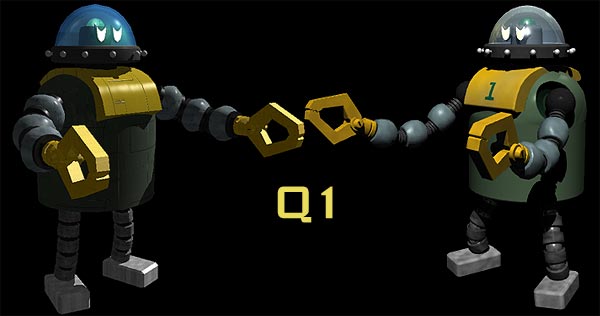
左が旧型。右が今回修正したものである。
メッシュが無くなってさっぱりしたが、デザインの一部変更と、各所の角取りを行っているので、情報量は倍増している。
また今回は手足もちゃんと動くようにしたので、左は作ったままのポーズだが、新しい方はこのようなポーズをあらためてとらせている。
 基本的には前の形状をベースに、自由曲面で作っていっただけなのだが、何カ所か苦労したところがある。 基本的には前の形状をベースに、自由曲面で作っていっただけなのだが、何カ所か苦労したところがある。
まずはボディだが、前掛けのような黄色いパーツが不自然に本体にくっついていたので、ボディを分割して穴を開け、そこにはめ込むようにした。前掛けパーツも前後に分割して首の入る穴を新造している。
肩の部分も前は直接腕が生えていたので、今回はモデリングで穴を空けようと頑張ったのだが、やはりシワが消しきれずに断念し、結局ブーリアンで穴を空けた。
シェード7のラインフィット機能で曲面に張り付いた円を作り、それを延ばして作っているので、少しは角取り効果も出ていると思うのだが・・・。
 前掛けパーツは形状も変更し、背面では少し後ろに突きだした形にした。 前掛けパーツは形状も変更し、背面では少し後ろに突きだした形にした。
頭部内部は基本的に自由曲面で作り直しただけだが、光源や材質を変更してわざとらしく青くならないようにした。
今回最も大きな変更が手足のデザインとその可動で、初めてIK(インバース・キネマティック)を使った。
IKは可動ジョイントを複数設定してある場合、その先端部分を動かすだけでそれに繋がる他の部分も連動して動かすことができる機能で、例えば手を大きく動かせば腕や肩の関節もそれに連動して動いてくれるのである。
化夢宇留仁は今までず〜〜〜〜っとIKは特殊な設定を施さなくては使用できないと思いこんでおり、今回蛇腹状関節を実現させようとマニュアルを読んで、実はまったく設定は必要なく、単にそのように操作すればいいと気付いて大ショック(笑)。
今まで指の関節とか、一つ一つ動かしていた化夢宇留仁の苦労って・・・(汗)。
ちうわけで可動ジョイントさえ設置してやればいいと分かり、蛇腹状関節も普段通り作ればいいと判明したので、作った(笑)。
腕。コブのようなパーツの間にリングを4つずつ設置し、そのリング毎に少しずつ回転するように設定。
通常はこんな状態を動かすのは恐ろしい手間だが、IKなら手の部分を選択して上位のジョイントを指定して動かすだけで、この通り。
リングが少しずつ回転しているのが確認できる。
脚。こっちは単純にリングを5個並べ、それぞれが回転するように設定。
足首を選択して後ろに動かせば・・・
ぐにゃ〜〜〜。
な・・・なんて簡単なんだ(汗)。
今までの苦労を思うと、嬉しいやら悲しいやら・・・(笑)。
ただしシェードのIKは9階層までしか遡れないので、今回程度なら問題ないが、長〜い蛇腹状の物体とかを曲げるには力不足。
この機能を生かしてウルトラセブンに出てきた金属龍ナースを作ってやろうかと思ったのに、残念である(笑)。
まあ所々で分割しながら動かせば問題ないのだが、スムーズに角度が変化していくのを作るのは難しいだろう。

|